输入电压115-230VAC
电流0-5A
输出电压0-180VDC
适配电机直流电机
适用场合机械传动
材质不锈钢和铜
电机响应时间0.1秒
驱动器输出方式电压输出
驱动器电压24VDC
驱动器电流5A
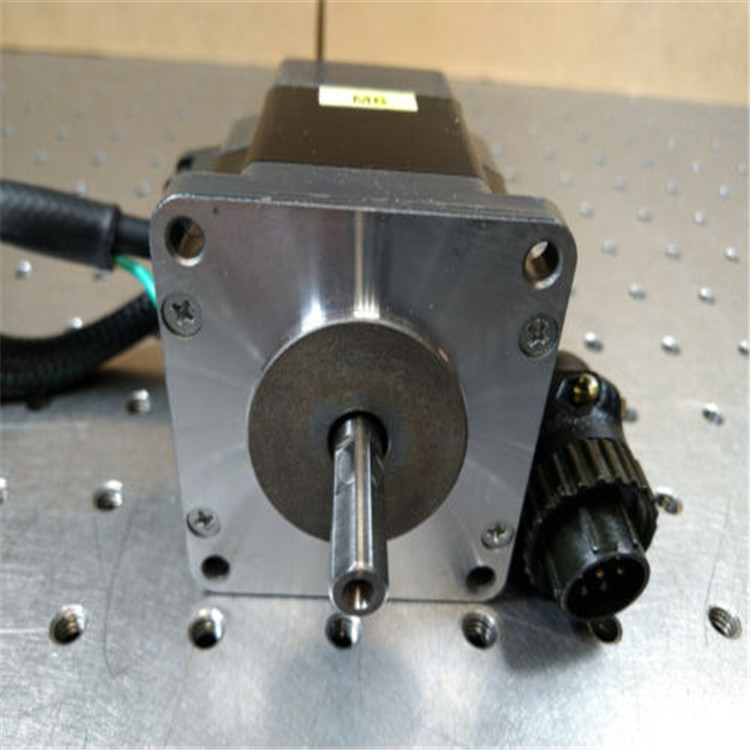
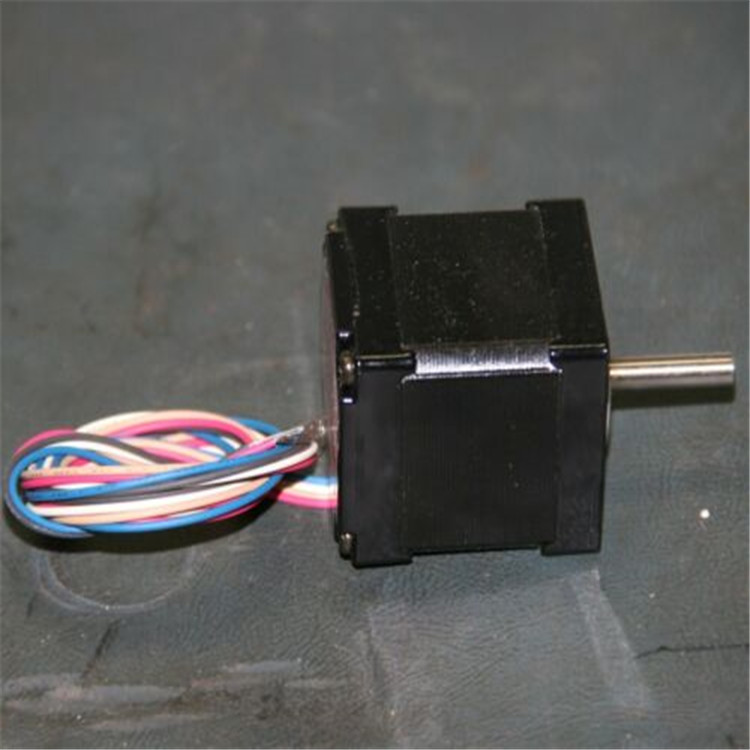
MYCOM驱动器位移或线位移。过载性好。其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,步进电机使用时对速度和位置都有严格要求。控制方便。步进电机是以“步”为单位旋转的,数字特征比较明显。整机结构简单。传统的机械速度和位置控制结构比较复杂,调整困难,使用步进电机后,使得整机的结构变得简单和紧凑。测速电机是将转速转换成电压,并传递到输入端作为反馈信号。测速电机为一种型电机,在普通直流电机的尾端安装测速电机,通过测速电机所产生的电压反馈给直流电源,来达到控制直流电机转速的目的。
ISD500-020
ISD500-120
PEE533-A
PEE535-A
PCE5431-AC
PCE5441-AC
PCE5451-AC
PCE5641-AC
PCE5661-AC
PCE5691-AC
GTS500-020
GTS500-120

一般小型(低档)PLC具有逻辑运算、定时、计数等功能,对于只需要开关量控制的设备都可满足。
对于以开关量控制为主,带少量模拟量控制的系统,可选用能带A/D和D/A转换单元,具有加减算术运算、数据传送功能的增强型低档PLC。对于控制较复杂,要求实现PID运算 、闭环控制、通信联网等功能,可视控制规模大小及复杂程度,选用中档或PLC。但是中、PLC价格较贵,一般用于大规模过程控制和集散控制系统等场合。
IMS50-220-5962AC(BC)
IMS50-220-5992AC(BC)
IMS50-220-59132AC(BC)
ISD200-120L
ISD200-220L
PF244H-A(B)
PF266-A(B)
PF264-A(B)
PF268-A(B)
PF265-A(B)
RMS20-210
RMS20-211
RMS20-212
NSM50-6571
NSM50-6641
NSM50-6701
NSM50-6931
CBS50-010
CBS50-110
OSC-PCS28P15
OMC-PHR6P15
OMC-XHP6P15
OPC-X3P20
MR-300DS
MPR-100JWIN
MPR-100S
MPR-100S-D
MPV-100S
MPV-101S
MPV-100S-D
MPV-101S-D
ICD201-1120A

摩擦制动器是利用两个运动表面相互接触时所产生的摩擦阻力,将汽车运动时的动能和势能转化为热能,从而达到使汽车减速或停车的一种装置。摩擦制动器是使机械中的运动件停止或减速的机械零件。俗称刹车。利用两个运动表面相互接触时所产生的摩擦阻力,将汽车运动时的动能和势能转化为热能,从而达到使汽车减速或停车的一种装置。
摩擦制动器主要由制动架、制动件和操纵装置等组成。有些摩擦制动器还装有制动件间隙的自动调整装置。为了减小制动力矩和结构尺寸,摩擦制动器通常装在设备的高速轴上,但对安全性要求较高的大型设备(如矿井提升机、电梯等)则应装在靠近设备工作部分的低速轴上。有些制动器已标准化和系列化,并由工厂制造以供选用。
IMS21-220 (L)
IMS21-220-243A(B)
IMS21-220-244A(B)
IMS21-220-245A(B)
IMS21-220-264A(B)
IMS21-220-265A(B)
IMS21-220-268A(B)
PF245-A(B)
IMS21-220
MLN20-110
MLN20-210
MLN20-210-264A(B)
MLN20-210-265A(B)
MLN20-210-268A(B)
在可编程逻辑控制器系统设计时,首先应确定控制方案,下一步工作就是可编程逻辑控制器工程设计选型。工艺流程的特点和应用要求是设计选型的主要依据。可编程逻辑控制器及有关设备应是集成的、标准的,按照易于与工业控制系统形成一个整体,易于扩充其功能的原则选型所选用可编程逻辑控制器应是在相关工业领域有投运业绩、成熟可靠的系统,可编程逻辑控制器的系统硬件、软件配置及功能应与装置规模和控制要求相适应。熟悉可编程序控制器、功能表图及有关的编程语言有利于缩短编程时间,因此,工程设计选型和估算时,应详细分析工艺过程的特点、控制要求,明确控制任务和范围确定所需的操作和动作,然后根据控制要求,估算输入输出点数、所需存储器容量、确定可编程逻辑控制器的功能、外部设备特性等,后选择有较高性能价格比的可编程逻辑控制器和设计相应的控制系统。
//www.ha0618.com